
Позиционные регуляторы – это специальные устройства и системы, используемые для поддержания заданной позиции или положения объекта в автоматическом режиме. Они широко применяются в различных отраслях, где требуется точное позиционирование, таких как промышленное производство, робототехника, авиационная и космическая промышленность и другие.
Для реализации позиционного регулирования применяются различные принципы и методы. Одним из них является двухпозиционное регулирование. В этом случае объект управления имеет два возможных состояния – включено (например, полностью открыто) или выключено (например, полностью закрыто). Когда объект не находится в требуемой позиции, позиционный контроллер подает команду на изменение состояния – включение или выключение – для достижения требуемого положения.
Двухпозиционное регулирование является достаточно простым и эффективным методом, однако не всегда позволяет достичь высокой точности позиционирования. В некоторых случаях требуется более сложная и гибкая система регулирования, которая позволяет плавно изменять положение объекта в соответствии с требованиями. В таких случаях применяются другие виды позиционных регуляторов, например, регуляторы с обратной связью или регуляторы с пропорциональным интегрально-дифференциальным (ПИД) алгоритмом.
Что такое позиционные регуляторы?
Позиционные регуляторы – это устройства, используемые в автоматическом контроле и регулировании процессов, чтобы установить и поддерживать желаемое положение объекта управления. Они работают на основе обратной связи, сравнивая текущее положение объекта с заданным значением и определяя необходимое управляющее воздействие.
Одной из особенностей позиционных регуляторов является то, что они принимают только два возможных состояния – полностью включено или полностью отключено. Таким образом, они реагируют на изменение положения объекта управления, включая или отключая внешние устройства с заданной интенсивностью.
Применение позиционных регуляторов особенно полезно в системах, где необходимо точное и стабильное положение объекта управления. Они широко используются в промышленности, например, для регулирования положения клапанов, заслонок и других устройств.
Определение позиционных регуляторов
Позиционные регуляторы — это устройства, используемые для автоматического контроля и регулирования позиции объекта, основанного на его текущем положении и желаемом положении. Они являются основой для создания систем автоматического управления и применяются в различных областях, включая промышленность, энергетику, транспорт и другие.
Позиционные регуляторы работают на основе обратной связи — они сравнивают текущую позицию объекта с желаемой и принимают меры для изменения положения объекта согласно заданной программе или заданию. Это достигается путем использования различных датчиков, позволяющих определить текущую позицию объекта и передать эту информацию контроллеру.
Одной из основных функций позиционных регуляторов является поддержание объекта в заданной позиции. Они могут иметь различные режимы работы, такие как режим двухпозиционного регулирования, режим пропорционально-интегрально-дифференциального регулирования и другие. В зависимости от требований и характеристик системы, выбирается оптимальный режим работы позиционного регулятора.
Позиционные регуляторы являются важным элементом систем автоматического управления и позволяют значительно улучшить эффективность работы объектов. Они обеспечивают точное позиционирование и стабильную работу системы, что особенно важно в случае работы с высокоточными приборами и оборудованием.
Принцип работы позиционных регуляторов
Позиционные регуляторы — это устройства, которые предназначены для поддержания заданной позиции объекта в системе автоматического управления. Они основываются на принципе обратной связи, где измеряемое значение позиции объекта сравнивается с заданным значением и на основе полученной разницы принимается решение о необходимых корректировках.
Алгоритм работы позиционного регулятора включает несколько этапов. Вначале происходит считывание текущего значения позиции объекта, как правило, с помощью датчика или измерительного устройства. Затем измеренное значение сравнивается с заданным значением, которое указано в управляющей системе.
При сравнении происходит вычисление разницы между измеренным и заданным значениями позиции. Эта разница называется ошибкой позиции. Далее, на основе значения ошибки, происходит корректировка управляющих сигналов, которые подаются на исполнительный орган объекта.
Основная задача позиционного регулятора заключается в том, чтобы минимизировать ошибку позиции и обеспечить стабильность и точность позиционирования объекта. Для этого регуляторы используют различные алгоритмы и методы, включая пропорционально-интегрально-дифференциальное (ПИД) управление, аналитическое управление и другие.
Применение позиционных регуляторов
Позиционные регуляторы широко применяются в системах автоматического управления для обеспечения точной позиционной устойчивости объектов. Они осуществляют регулирование путем сравнения текущего положения объекта с заданной позицией и выдачи соответствующего управляющего сигнала для поддержания требуемой позиции.
Применение позиционных регуляторов позволяет точно контролировать позицию и положение различных механизмов и систем. Например, в промышленности позиционные регуляторы часто используются в системах автоматического управления станками, роботами и конвейерными линиями для точного позиционирования рабочих органов.
Позиционные регуляторы также применяются в энергетике для регулирования положения клапанов, заслонок и других управляющих элементов системы. Они обеспечивают точную установку и поддержание требуемого положения этих элементов, что позволяет оптимизировать работу всей системы и увеличить её эффективность.
Кроме того, позиционные регуляторы применяются в системах автоматического управления для поддержания стабильности и точности работы различного рода приборов и оборудования. Например, в автомобилестроении они используются для контроля положения амортизаторов, рулевого управления и других элементов подвески и управления.
Таким образом, применение позиционных регуляторов имеет широкий спектр применения и позволяет обеспечить точное позиционирование и управление объектами различных систем и устройств.
Применение позиционных регуляторов в промышленности
Позиционные регуляторы широко применяются в промышленности для автоматизации различных процессов. Они позволяют удерживать объекты в заданной позиции, обеспечивая стабильность и точность в работе механизмов. Применение позиционных регуляторов в промышленности позволяет повысить эффективность производства и снизить число ошибок и аварийных ситуаций.
Позиционные регуляторы находят применение в различных отраслях промышленности, включая автомобильное производство, машиностроение, пищевую промышленность и многие другие. Например, в автомобильной промышленности позиционные регуляторы используются для управления двигателем, рулевым управлением и трансмиссией, обеспечивая точное позиционирование автомобиля и его деталей.
Применение позиционных регуляторов в промышленности также связано с управлением робототехническими системами. Они используются для точного позиционирования роботов и манипуляторов, обеспечивая точность и безопасность при выполнении различных задач. Позиционные регуляторы также находят применение в системах сборки и обработки материалов, где необходимо точное позиционирование рабочих инструментов и деталей для обеспечения качества и эффективности процессов.
В целом, применение позиционных регуляторов в промышленности позволяет автоматизировать и улучшить различные процессы, сократить время выполнения задач и повысить точность и надежность работы систем и механизмов. Они являются неотъемлемой частью современной промышленности и способствуют оптимизации производства и повышению качества продукции.
Применение позиционных регуляторов в бытовых устройствах
Позиционные регуляторы широко применяются в различных бытовых устройствах для обеспечения точного управления и регулирования различных параметров. Они позволяют удобно и эффективно управлять устройствами, обеспечивая стабильность работы и достижение необходимых показателей.
Например, в бытовых кондиционерах позиционные регуляторы используются для поддержания заданной температуры в помещении. Они контролируют работу компрессора и вентилятора, регулируя их скорость и интенсивность работы. Таким образом, кондиционер поддерживает комфортные условия внутри помещения, автоматически подстраиваясь под изменения окружающей среды.
Еще одним примером применения позиционных регуляторов в бытовых устройствах являются стиральные машины. Они используют регуляторы для контроля скорости вращения барабана и уровня воды. Это позволяет автоматически адаптироваться к различным типам тканей и загрузкам, обеспечивая оптимальные условия стирки и сокращая расход энергии и воды.
Также позиционные регуляторы применяются в бытовых отопительных системах. Они контролируют работу клапанов, регулируя подачу горячей воды или пара в отопительные приборы. Это позволяет поддерживать заданную температуру и равномерное отопление в помещениях, обеспечивая комфортные условия проживания.
В общем, применение позиционных регуляторов в бытовых устройствах существенно улучшает их функциональность и удобство использования. Они позволяют достичь точного управления и регулирования различных параметров, автоматически адаптируясь к изменяющимся условиям и потребностям пользователей.
Что такое двухпозиционное регулирование?
Двухпозиционное регулирование — это один из способов работы позиционного регулятора, который используется для управления системой или устройством. В отличие от других методов регулирования, таких как пропорциональный или интегральный регуляторы, двухпозиционное регулирование основывается на принципе переключения между двумя стабильными состояниями.
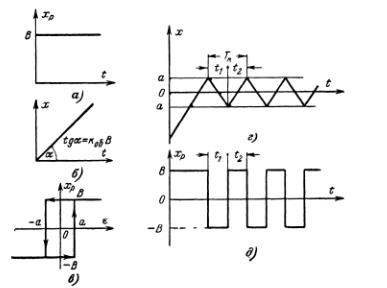
При двухпозиционном регулировании система может находиться в одном из двух состояний: «Включено» или «Выключено». Когда система достигает желаемого значения, регулятор переключает ее в состояние «Выключено». Когда значение уходит от желаемого значения, регулятор переключает систему в состояние «Включено». Таким образом, двухпозиционное регулирование управляет системой путем переключения между этими двумя состояниями.
Двухпозиционное регулирование часто используется в системах отопления, кондиционирования воздуха и других системах, где требуется точное поддержание установленной температуры или других параметров. Этот метод регулирования прост в реализации и дешев в использовании, однако он может приводить к некоторой нестабильности системы и «рассинхронизации» между желаемым и фактическим значением.
Определение двухпозиционного регулирования

Двухпозиционное регулирование — это метод управления и регулирования, при котором выходная величина системы принимает только два возможных значения: полностью открытое или полностью закрытое состояние.
В системах двухпозиционного регулирования используются позиционные регуляторы, которые принимают решение о положении переключающего элемента на основе сравнения текущего значения управляемой величины с определенным пороговым значением. Если значение управляемой величины превышает пороговое значение, то переключающий элемент переходит в положение «включено», иначе в положение «выключено».
Двухпозиционное регулирование наиболее часто используется в системах, где требуется достижение заданного значения управляемой величины со строгой точностью. Например, в системах отопления, где требуется поддержание температуры в заданных пределах, регулятор может переключаться между включенным и выключенным состоянием в зависимости от того, достигнута ли заданная температура. Такой подход позволяет обеспечить стабильность работы системы и предотвратить перегрев или охлаждение.
Однако двухпозиционное регулирование обладает некоторыми недостатками. Например, такая система может вызывать частые переключения, что может приводить к износу переключающего элемента. Кроме того, такой режим работы может быть неэффективным с точки зрения энергопотребления, так как переключение между включенным и выключенным состоянием слишком резкое, и это может вызывать большие колебания в управляемой величине.
Преимущества и недостатки двухпозиционного регулирования
Двухпозиционное регулирование — это простая и дешевая система управления, которая имеет свои преимущества и недостатки. Она широко применяется в различных областях, включая промышленность и бытовую технику.
Одним из главных преимуществ двухпозиционного регулирования является его простота. Система состоит из двух позиций: вкл/выкл, что делает ее легкой в понимании и настройке. Также она дешева в обслуживании и не требует сложного программирования.
Кроме того, двухпозиционное регулирование обеспечивает стабильную работу системы, т.к. управляющий сигнал подается только в двух состояниях — вкл/выкл. Это позволяет избежать постоянных колебаний и достичь желаемого результата с минимальной погрешностью.
Однако, у двухпозиционного регулирования есть и недостатки. В первую очередь, такая система не обладает гибкостью и точностью, что может привести к неконтролируемым колебаниям и неустойчивости в работе. Также, система может вызывать большие перепады температур или давления, что может быть нежелательным в некоторых областях применения.
Кроме того, двухпозиционное регулирование может потреблять больше энергии, так как работает по принципу вкл/выкл. Это может привести к излишнему расходу электроэнергии или механическому износу оборудования.
В целом, двухпозиционное регулирование является простым и экономически выгодным способом управления, однако не всегда подходит для решения сложных и точных задач. При выборе регулятора необходимо учитывать особенности конкретной системы и требования к точности и стабильности работы.
Видео:
Рекомендуем:
 Почему патрон и лампочка нагреваются в течение 5 минут после включения настольного светильника?
Почему патрон и лампочка нагреваются в течение 5 минут после включения настольного светильника?
 Реле контроля напряжения: назначение, устройство, установка и схемы подключения
Реле контроля напряжения: назначение, устройство, установка и схемы подключения
 Важность электрооборудования в лифтах: функциональность и безопасность
Важность электрооборудования в лифтах: функциональность и безопасность
 Термопара для газовой плиты: принцип работы, устройство, типы и замена
Термопара для газовой плиты: принцип работы, устройство, типы и замена
 Конденсаторные установки распределительных подстанций: назначение и особенности эксплуатации
Конденсаторные установки распределительных подстанций: назначение и особенности эксплуатации
 Основные виды монтажа кабельных лотков и каналов
Основные виды монтажа кабельных лотков и каналов
 Технические и электрические параметры диода IN-5822: преимущества и недостатки
Технические и электрические параметры диода IN-5822: преимущества и недостатки
 Практические расчеты для улучшения коэффициента мощности в трехфазной сети
Практические расчеты для улучшения коэффициента мощности в трехфазной сети