
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор – это один из наиболее распространенных и эффективных методов автоматического управления, используемых во многих областях техники и науки. Он представляет собой сложную систему, состоящую из трех основных компонентов: пропорционального, интегрального и дифференцирующего.
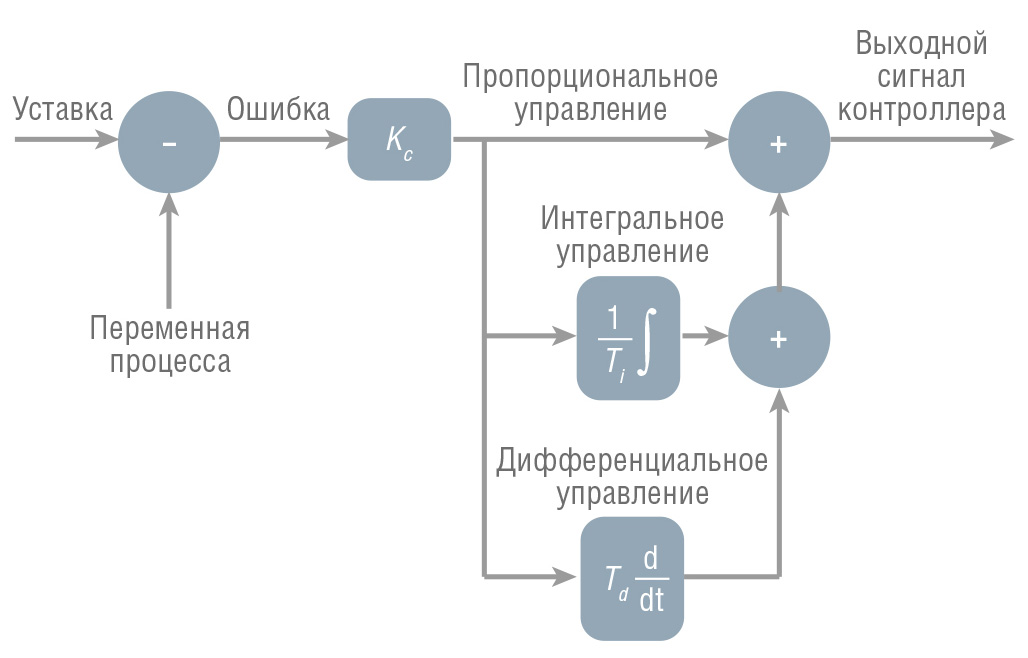
В основе работы ПИД-регулятора лежит принцип обратной связи, при котором регулятор сравнивает фактическое значение некоторой переменной с заданным значением (заданным уставкой) и на основе этого сравнения рассчитывает корректирующий сигнал. Пропорциональная составляющая регулирования напрямую пропорциональна разности между заданным и фактическим значением, интегральная составляющая позволяет устранить постоянную ошибку, а дифференцирующая составляющая улучшает скорость и стабильность регулирования путем учета изменения переменной во времени.
Использование ПИД-регулятора имеет широкий спектр приложений, включая автоматическое управление технологическими процессами, регулирование температуры, скорости и позиции в механизмах, управление полетом и дронами, а также в других областях, где требуется точное и стабильное управление системой. Правильная настройка ПИД-регулятора позволяет достичь оптимальной работы системы с минимальными ошибками и корректировками.
Пропорционально-интегрально-дифференцирующий ПИД-регулятор: принцип работы, теория и практика — все, что нужно знать начинающему [Автоматизация automatic]
Принцип работы ПИД-регулятора основан на математическом алгоритме, который управляет выходным сигналом с учетом разности между заданным значением и текущим значением измеряемой величины. Пропорциональная составляющая регулирует выходной сигнал пропорционально этой разности, интегральная составляющая накапливает ошибку во времени, а дифференцирующая составляющая учитывает изменение ошибки со временем. Комбинированное действие всех трех компонентов обеспечивает более точное и стабильное управление процессом.
ПИД-регуляторы находят широкое применение в автоматической регулировке множества процессов, таких как скорость и позиция двигателей, температура, уровень жидкости и многие другие. Они позволяют поддерживать заданные параметры процесса на оптимальном уровне, устраняют перерегулирования и нестабильность, а также обеспечивают быстрое и точное реагирование на изменения внешних условий.
Практическое применение ПИД-регуляторов требует правильной настройки и оптимизации параметров. Для начинающего инженера важно иметь понимание основных принципов работы и возможных проблем, связанных с настройкой ПИД-регулятора. Проведение экспериментов и анализ результатов позволит оценить эффективность регулятора и вносить необходимые коррективы.
В итоге, ПИД-регулятор является мощным инструментом, который позволяет достичь точного и стабильного управления процессом в автоматизации. Понимание его принципов работы и практическое применение являются важными навыками для инженера в области автоматизации и контроля процессов.
Автоматизация automatic
Пропорционально-интегрально-дифференцирующий ПИД-регулятор
Пропорциональное регулирование основано на том, что выходное значение регулятора прямо пропорционально разности между заданным значением и текущим значением величины. То есть, чем больше разница между заданным и текущим значением, тем больше корректирующий сигнал от регулятора.
Интегральное регулирование включает в себя интегрирование разности между заданным и текущим значением величины в течение определенного промежутка времени. Это позволяет устранить ошибку установки и обеспечить точность регулирования на длительных временных интервалах.
Дифференцирующее регулирование используется для предварительного определения скорости изменения величины и предотвращения перерегулирования. Оно основано на анализе производной разности между заданным и текущим значением.
Применение пропорционально-интегрально-дифференцирующего ПИД-регулятора позволяет достичь стабильности, точности и быстродействия в регулировании систем. Он нашел широкое применение в различных областях, включая промышленность, автоматизацию процессов и робототехнику.
Принцип работы ПИД-регулятора
Принцип работы ПИД-регулятора заключается в сравнении фактического значения измеряемого параметра с его желаемым значением и корректировке выходного сигнала регулятора для минимизации разницы между ними.
ПИД-регулятор состоит из трех основных компонентов: пропорционального, интегрального и дифференцирующего. Каждый из них вносит свой вклад в коррекцию выходного сигнала.
Пропорциональный компонент сравнивает разницу между фактическим и желаемым значением, применяя коэффициент пропорциональности. Он регулирует выходной сигнал, пропорционально ошибке, что позволяет быстро реагировать на изменения величины измеряемого параметра.
Интегральный компонент интегрирует ошибку на протяжении времени, корректируя выходной сигнал пропорционально накопленной ошибке. Это позволяет быстрее снизить ошибку и точнее установиться на желаемом значении.
Дифференцирующий компонент учитывает изменение ошибки со временем, пропорционально ее скорости изменения. Он помогает предотвращать колебания и улучшает реакцию на изменения величины измеряемого параметра.
Работа ПИД-регулятора основана на постоянном мониторинге и коррекции выходного сигнала, чтобы поддерживать стабильность и точность в процессе регулирования. Благодаря комплексному подходу, ПИД-регулятор позволяет достичь оптимальной работы системы, снижая ошибку и улучшая желаемые параметры.
Формула расчета управляющего сигнала
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор используется для управления системами, обеспечивая стабильность и точность регулирования. Рабочая формула для расчета управляющего сигнала в таком регуляторе имеет вид:
Управляющий сигнал = Кп * (e + (1 / Ti) * ∫e dt + Td * de/dt)
где:
- Управляющий сигнал — значение сигнала, подаваемого на исполнительный механизм;
- Кп — коэффициент пропорциональности, определяющий влияние ошибки управления на управляющий сигнал;
- e — ошибка управления, равная разнице между заданным значением и текущим состоянием системы;
- Ti — коэффициент интегрирования, определяющий скорость устранения постоянной ошибки управления;
- ∫e dt — интеграл ошибки управления по времени;
- Td — коэффициент дифференцирования, определяющий скорость реакции на изменение ошибки управления;
- de/dt — производная ошибки управления по времени.
Расчет управляющего сигнала происходит путем умножения каждой компоненты на соответствующий коэффициент и их последующего сложения. Такая комбинация пропорционального, интегрального и дифференцирующего действий позволяет управлять системой сообразно текущему состоянию и требуемым параметрам.
Важно правильно настроить значения Кп, Ti и Td для достижения оптимальной работы ПИД-регулятора и предотвращения возможных нестабильностей или избыточной реакции.
Влияние коэффициентов на характеристики
Коэффициенты пропорциональной, интегральной и дифференцирующей частей — Kp, Ki и Kd соответственно — играют важную роль в определении характеристик ПИД-регулятора и его поведения в системе управления. Корректный выбор этих коэффициентов позволяет достичь желаемого уровня стабилизации или регулирования процесса.
Пропорциональный коэффициент Kp определяет величину коррекции, пропорциональную разнице между заданием (установившимся значением, которое требуется достичь) и текущим значением процесса. Большое значение Kp приводит к быстрой реакции системы и быстрому достижению установившегося значения, но может также вызывать нестабильность и колебания системы.
Интегральный коэффициент Ki определяет величину коррекции, пропорциональную накопленной ошибке управления в течение времени. Ki играет важную роль в устранении установившейся ошибки и обеспечении стабильности системы. Слишком большое значение Ki может вызвать слишком медленную реакцию системы или вызвать ее колебания.
Дифференцирующий коэффициент Kd определяет величину коррекции, пропорциональную скорости изменения процесса. Kd позволяет предотвратить перерегулирование и обеспечить более гладкую и стабильную реакцию системы. Однако слишком большое значение Kd может вызвать такие проблемы, как увеличение шума и чувствительность к помехам в системе.
Подбор оптимальных значений Kp, Ki и Kd является непростой задачей и требует определенного уровня экспертизы. Обычно он основывается на анализе динамических характеристик и требованиях к системе управления. Коэффициенты ПИД-регулятора могут быть настроены как вручную, так и автоматически с использованием методов автонастройки.
Использование корректных и оптимальных значений коэффициентов ПИД-регулятора позволяет достичь стабильности, точности и эффективности в системе управления. Однако необходимо учитывать, что разные процессы и системы могут требовать разных коэффициентов для достижения желаемых результатов, поэтому подбор оптимальных значений требует тщательного анализа и опыта.
Пример применения
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор широко применяется в автоматическом управлении для стабилизации системы и обеспечения точности в различных процессах.
Один из примеров его применения — регулирование температуры в помещении. Рассмотрим ситуацию, когда требуется поддерживать постоянную комфортную температуру в помещении. В данном случае ПИД-регулятор будет использоваться для корректировки работы системы отопления.
При помощи датчика температуры измеряется текущая температура в помещении, которая сравнивается с желаемой установленной температурой. Разница между текущей и желаемой температурой называется ошибкой. Эта ошибка передается в ПИД-регулятор, который вычисляет оптимальное значение управляющего сигнала для подачи на систему отопления.
Пропорциональная составляющая ПИД-регулятора изменяет выходной сигнал пропорционально величине ошибки. Это означает, что чем больше разница между текущей и желаемой температурой, тем больше будет выходной сигнал ПИД-регулятора, и наоборот.
Интегральная составляющая ПИД-регулятора накапливает ошибку с течением времени и использует это накопление для корректировки выходного сигнала. Это позволяет устранять маленькие постоянные ошибки и приближать текущую температуру к желаемой.
Дифференцирующая составляющая ПИД-регулятора анализирует скорость изменения ошибки и использует эту информацию для предотвращения резких колебаний и быстрого достижения стабильной температуры.
Таким образом, применение ПИД-регулятора в системе отопления позволяет поддерживать постоянную комфортную температуру в помещении, реагировать на изменения быстро и точно, а также устранять постоянные и временные ошибки.
Теория

Пропорциональная составляющая определяет выходной сигнал регулятора прямо пропорционально разнице между заданным значением и фактическим значением измеряемого параметра. Этот компонент реагирует незамедлительно, что позволяет быстро устранять малые отклонения от желаемого режима работы.
Интегральная составляющая отслеживает и корректирует постоянные ошибки. Она интегрирует разницу между заданным значением и измеряемым значением на протяжении времени. Таким образом, она позволяет устранять накопленные ошибки и стремиться к точной и стабильной регуляции.
Дифференцирующая составляющая предотвращает резкие изменения системы путем предсказания и контроля производной измеряемого параметра. Она позволяет предотвратить резкие скачки, быстро реагируя на изменения и снижая колебания системы.
Комбинируя эти три составляющие, ПИД-регулятор обеспечивает точный и быстрый контроль системы. Часто одним компонентам ПИД-регулятора придают различную важность в зависимости от требований и характеристик конкретной системы. Настройка ПИД-регулятора – это искусство, требующее глубокого понимания процесса, но правильно настроенный ПИД-регулятор может значительно повысить стабильность и эффективность системы управления.
Математическое описание ПИД-регулятора
Математический вид ПИД-регулятора можно представить следующим образом:
| Управляющий сигнал: | U(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt |
|---|
где:
- U(t) — управляющий сигнал в момент времени t;
- Kp — коэффициент пропорциональности;
- Ki — коэффициент интегральности;
- Kd — коэффициент дифференциальности;
- e(t) — ошибка управления в момент времени t;
- ∫e(t)dt — интеграл ошибки управления;
- de(t)/dt — производная ошибки управления по времени.
Коэффициенты Kp, Ki и Kd являются настраиваемыми параметрами ПИД-регулятора и позволяют изменять его поведение и эффективность. Коэффициент пропорциональности определяет величину реакции на текущую ошибку, коэффициент интегральности управляет учетом накопленной ошибки и коэффициент дифференциальности влияет на скорость реакции регулятора на изменение ошибки.
Математическое описание ПИД-регулятора представляет собой алгоритм, который расчетно определяет оптимальные значения управляющего сигнала для минимизации ошибки управления и обеспечивает стабильную работу системы. Этот алгоритм может быть реализован как на аппаратном уровне, с использованием специализированной электроники, так и на программном уровне с применением вычислительной техники.
Автоматическое настройка ПИД-регулятора

Для автоматической настройки ПИД-регулятора часто применяются специальные методы и алгоритмы, которые позволяют определить оптимальные значения коэффициентов на основе анализа динамики системы и ее отклика на различные воздействия. Одним из наиболее распространенных методов автоматической настройки является метод наименьших квадратов.
Метод наименьших квадратов основан на поиске таких значений коэффициентов ПИД-регулятора, при которых сумма квадратов отклонений между желаемым и фактическим выходом системы будет минимальной. Для этого производятся серии испытаний системы с различными значениями коэффициентов, и на основе полученных данных вычисляются оптимальные значения.
Для удобства и наглядности анализа результатов автоматической настройки ПИД-регулятора разработаны специальные инструменты и программные средства. С помощью этих средств можно визуализировать графики отклика системы на различные входные сигналы, а также анализировать различные показатели эффективности работы системы, такие как перерегулирование, время переходного процесса и установившееся значение.
| Преимущества автоматической настройки ПИД-регулятора: |
|---|
| Автоматизация процесса настройки, что позволяет сэкономить время и силы оператора. |
| Объективная оптимизация значений коэффициентов на основе математических расчетов. |
| Улучшение стабильности и точности работы системы автоматического управления. |
Ограничения использования
- Динамические особенности системы: ПИД-регулятор может быть неэффективным в случае, если система имеет сложную динамику или быстро меняющиеся параметры. В таких случаях может потребоваться применение более сложных и адаптивных алгоритмов управления.
- Настройка параметров: Для оптимальной работы ПИД-регулятора необходимо правильно настроить его параметры. Неверная настройка может привести к нестабильности системы или недостаточной точности регулирования. Настройка параметров требует опыта и экспертных знаний.
- Ограничения на значения управляющего сигнала: ПИД-регулятор может генерировать управляющий сигнал, который выходит за пределы допустимых значений для исполнительного устройства. В таких случаях необходимо использовать ограничители сигнала или другие методы ограничения выхода регулятора.
- Зависимость от точности измерений: ПИД-регулятор может быть чувствителен к погрешностям в измерениях входных величин. Низкая точность измерений может снизить эффективность и точность работы регулятора. Поэтому важно обеспечить высокую точность измерений.
- Необходимость зависимости от математической модели: ПИД-регулятор опирается на математическую модель системы, которая может быть неполной или приближенной. Если модель неверна, то регулятор может работать неэффективно или даже вызвать нестабильность системы.
Учитывая эти ограничения, ПИД-регулятор остается мощным и широко используемым инструментом управления и регулирования систем, но его применение требует внимательного анализа и настройки для достижения оптимальных результатов.
Практика
После того как вы ознакомились с основными принципами работы пропорционально-интегрально-дифференцирующего (ПИД) регулятора, пришло время перейти к практике.
Первым шагом является выбор правильных параметров для вашего ПИД-регулятора. Для этого необходимо провести подробный анализ вашей системы и ее поведения. Используйте теоретические знания, полученные из предыдущих разделов, чтобы понять, какие значения параметров будут оптимальными для вашего конкретного случая.
После выбора параметров, следующий шаг — настройка ПИД-регулятора. При этом важно помнить, что настройка может быть итеративным процессом. Начните с предполагаемых значений и постепенно их корректируйте, наблюдая за поведением системы.
Одной из основных практических задач является обеспечение стабильного и точного управления системой. Для этого необходимо провести эксперименты с различными параметрами и проверить, как они будут влиять на поведение вашей системы в разных условиях.
Помните, что каждая система уникальна, поэтому нет универсального набора параметров, который будет подходить для всех случаев. Это требует от вас терпения и настойчивости, чтобы найти оптимальные настройки и добиться желаемого результата.
Также не забывайте о возможности использования специализированного программного обеспечения для настройки ПИД-регулятора. Это позволит вам упростить процесс настройки и получить более точные результаты.
В конечном итоге, использование ПИД-регулятора может значительно повысить эффективность вашей системы управления и обеспечить устойчивую работу в широком диапазоне условий. Не бойтесь экспериментировать и искать новые подходы, чтобы достичь наилучших результатов.
Проектирование ПИД-регулятора

Проектирование ПИД-регулятора включает несколько важных шагов:
1. Определение требований к системе
Первоначально необходимо определить требования к системе управления, такие как точность регулирования, скорость отклика, устойчивость и прочие факторы. Это позволит определить основные параметры ПИД-регулятора.
2. Выбор типа ПИД-регулятора
Существует несколько типов ПИД-регуляторов, таких как П-регулятор, ПИ-регулятор, ПИД-регулятор. Каждый из этих типов имеет свои преимущества и недостатки, и выбор должен быть основан на требованиях и характеристиках системы управления.
3. Настройка коэффициентов
Настройка коэффициентов ПИД-регулятора является ключевым этапом его проектирования. Коэффициенты определяют влияние каждого из компонентов (пропорционального, интегрального и дифференцирующего) на управление системой. Для правильной настройки обычно используют методы экспериментальной и численной оптимизации.
4. Проверка и настройка
После проектирования ПИД-регулятора необходимо провести проверку его работы на реальной системе управления. В процессе проверки могут выявиться необходимость дополнительной настройки или модификации коэффициентов. Оптимальные значения коэффициентов могут быть достигнуты только при определенных условиях эксплуатации системы.
В итоге, правильное проектирование ПИД-регулятора позволяет добиться стабильной и точной работы системы управления, обеспечивая требуемый уровень производительности и надежности.
Видео:
Продвинутый Betaflight — что такое ПИД регулятор
ПИД-регулятор температуры REX-C100: краткий обзор.
Рекомендуем:
 Пускатель и контактор — отличия и правильный выбор для эффективности и надежности вашей системы
Обзор автоматических выключателей — Schneider Electric, Siemens, Legrand, АВВ, AЕ, ВА — все о функциональности и особенностях
Дифавтомат — инновационная технология, которая обеспечивает автоматическую дифференциацию математических функций и эффективное решение сложных задач
Основные принципы установки и настройки видеодомофонов в многоквартирный дом — подключение и схема работы
Пускатель и контактор — отличия и правильный выбор для эффективности и надежности вашей системы
Обзор автоматических выключателей — Schneider Electric, Siemens, Legrand, АВВ, AЕ, ВА — все о функциональности и особенностях
Дифавтомат — инновационная технология, которая обеспечивает автоматическую дифференциацию математических функций и эффективное решение сложных задач
Основные принципы установки и настройки видеодомофонов в многоквартирный дом — подключение и схема работы
 Источник питания 12в и 24в: принцип действия и как выбрать
Как проверить напряжение в сети простыми методами и обеспечить безопасность в использовании
Распространенные схемы включения однофазных и трехфазных электросчетчиков — разбираем самые популярные варианты и узнаем, как правильно подключить приборы!
Основные понятия электротехники — полное разъяснение ключевых терминов и определений, которые необходимо знать каждому
Источник питания 12в и 24в: принцип действия и как выбрать
Как проверить напряжение в сети простыми методами и обеспечить безопасность в использовании
Распространенные схемы включения однофазных и трехфазных электросчетчиков — разбираем самые популярные варианты и узнаем, как правильно подключить приборы!
Основные понятия электротехники — полное разъяснение ключевых терминов и определений, которые необходимо знать каждому
 Загадочные линии на выключателях света: что они означают?
Электрическая проводка в деревянном доме — безопасность и особенности монтажа для вашего спокойствия и удобства
Загадочные линии на выключателях света: что они означают?
Электрическая проводка в деревянном доме — безопасность и особенности монтажа для вашего спокойствия и удобства